Section4.4»» Week 10 (Jul 30-Aug 3)
This week we wrap up the course by tying together two concepts: the eigenvectors and eigenvalues of a matrix, and the idea of changing basis. This week's process, called diagonalization, lets us expose the geometry of a linear transformation by determining its matrix not with respect to the standard basis, but instead with respect to a basis of its eigenvectors. When this is possible to do, the matrix we obtain is a diagonal matrix (hence the name).
After all, eigenvectors are interesting in the first place because by definition, linear transformations act very simply on their eigenvectors: they act via scalar multiplication. So for example, if \(A\) is a \(3\times 3\) matrix with eigenvalues \(\lambda_1,\lambda_2,\lambda_3\) and eigenvectors \({\bf v}_1,{\bf v}_2,{\bf v}_3\text{,}\) then by definition we know
\begin{align} A{\bf v}_1 \amp = \lambda_1 {\bf v}_1 \amp A{\bf v}_2 \amp = \lambda_2 {\bf v}_2 \amp A{\bf v}_3 \amp = \lambda_3 {\bf v}_3\tag{4.4.1} \end{align}Letting \(\mathcal{E} = \bigl\{ {\bf v}_1, {\bf v}_2, {\bf v}_3 \bigr\}\text{,}\) we then know that IF \(\mathcal{E}\) is in fact a basis for \(\mathbb{R}^3\) then for any vector \({\bf x} \in \mathbb{R}^3\) we'll have
\begin{align} {\bf x} \amp = c_1{\bf v}_1 + c_2{\bf v}_2 + c_3{\bf v}_3\tag{4.4.2}\\ A{\bf x} \amp = A\bigl ( c_1{\bf v}_1 + c_2{\bf v}_2 + c_3{\bf v}_3 \bigr )\tag{4.4.3}\\ \amp = c_1\, A{\bf v}_1 + c_2\, A{\bf v}_2 + c_3\, A{\bf v}_3\tag{4.4.4}\\ \amp = c_1\, \lambda_1{\bf v}_1 + c_2\, \lambda_2{\bf v}_2 + c_3\, \lambda_3{\bf v}_3\tag{4.4.5} \end{align}Or, in other words,
\begin{align} {\rm If}\; \bigl\{ {\bf x} \bigr\}_\mathcal{E} = \left[\begin{array}{c} c_1\\ c_2\\ c_3\end{array}\right] \amp\amp {\rm then} \bigl\{ A{\bf x} \bigr\}_\mathcal{E} = \left[\begin{array}{c} \lambda_1 c_1\\ \lambda_2c_2\\ \lambda_3c_3\end{array}\right] = \left[\begin{array}{ccc}\lambda_1\amp\amp\\\amp\lambda_2\amp\\\amp\amp\lambda_3\end{array}\right]\left[\begin{array}{c} c_1\\ c_2\\ c_3\end{array}\right].\tag{4.4.6} \end{align}In other words, when \(A\) acts on the coordinates of a vector in this "eigenbasis" \(\mathcal{E}\text{,}\) it acts like a diagonal matrix. In this situation, we can then understand \(A\)'s action in the standard basis using a change-of-basis matrix.
Letting \(P = \bigl[ {\bf v}_1 \quad {\bf v}_2 \quad {\bf v}_3 \bigr]\text{,}\) we remember from Section 3.3 that \(P\) has the ability to change a vector's coordinates from the \(\mathcal{E}\)-basis to the standard basis. This becomes our tool to write \(A\) (which transforms standard basis coordinates into standard basis coordinates) as a product of three matrices: 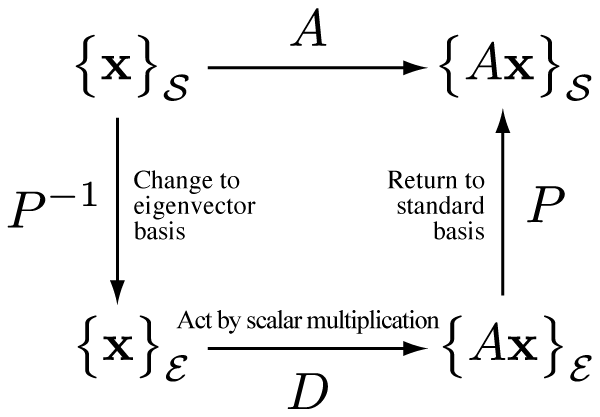
This process works whenever \(A\) has enough eigenvectors that they form a basis for \(\mathbb{R}^n\text{.}\) (Otherwise, (4.4.2) isn't generally possible.) While this criterion, called diagonalizability, is not met by every square matrix, and there are similar processes that find other "normal forms" for those matrices, it will suffice for us this semester to learn this process -- forward, to discover a diagonalization for a matrix, but also backward, to build a matrix in the standard basis given its eigenvector and eigenvalue data.
To do this week:
To do this week:
NOTE: Portfolio 4 will be combined with Portfolio 3. Continue to keep copies of your best work on each learning standard to prepare for submission of a cumulative portfolio (containing all of Chapters 1-4) upon Portfolio 4's due date.
By Tuesday 7/31:
- Read and annotate 4.3: Diagonalization, similarity, and powers of a matrix https://via.hypothes.is/http://merganser.math.gvsu.edu/david/linear.algebra/ula/ula/sec-eigen-diag.html
By Wednesday 8/1:
- Watch for Lecture 10 here.
- Submit Quiz 9R via Blackboard.
- Submit Quiz 10 via Blackboard.
By Friday 8/3:
- Submit Quiz 10R via Blackboard.
- Submit Portfolio 4 via Blackboard.
NOTE: You'll receive feedback on your Portfolio 4 material by Monday of next week, and next week you'll complete the final exam by working on only those learning standards you haven't mastered to that point.